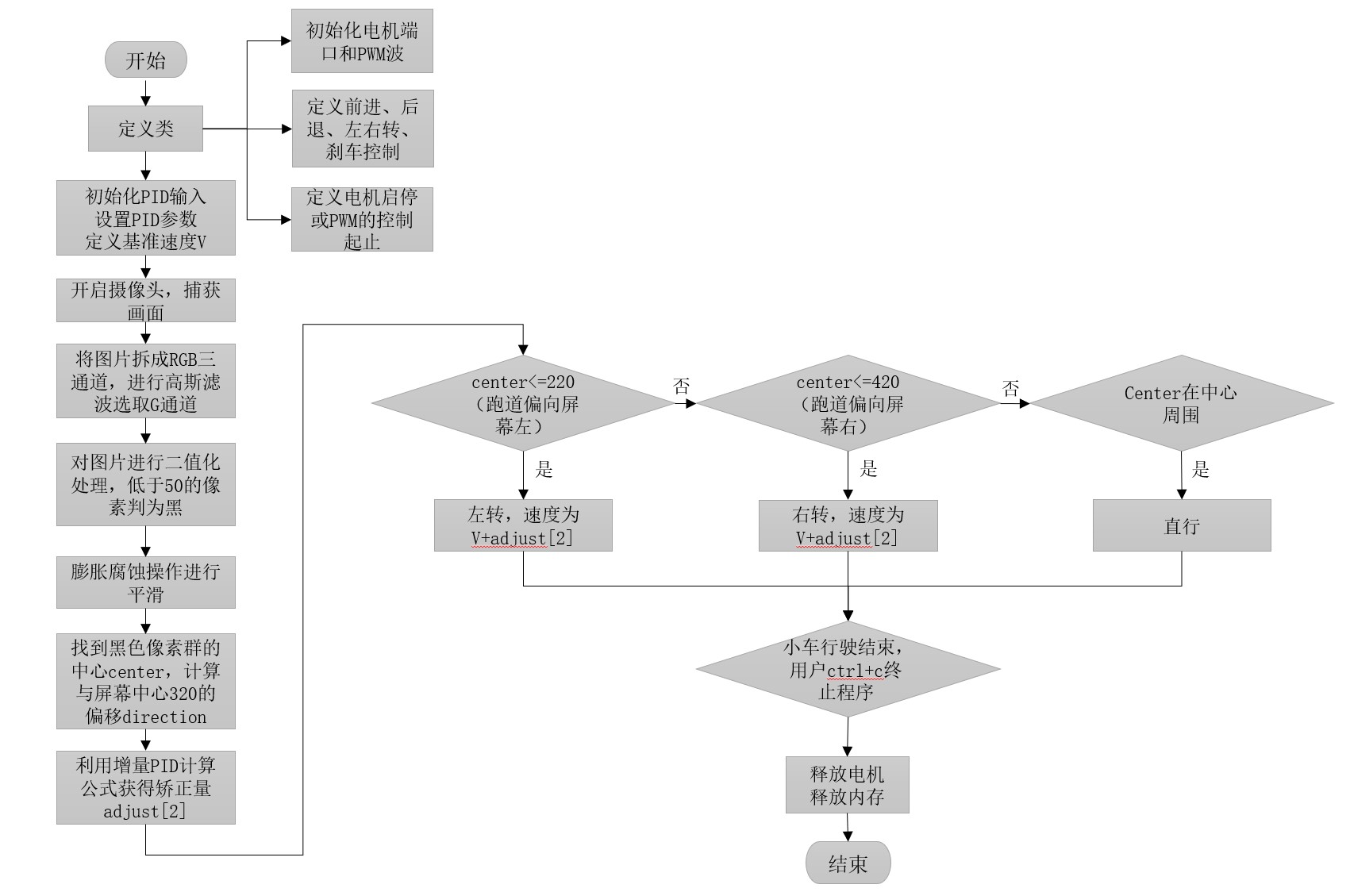
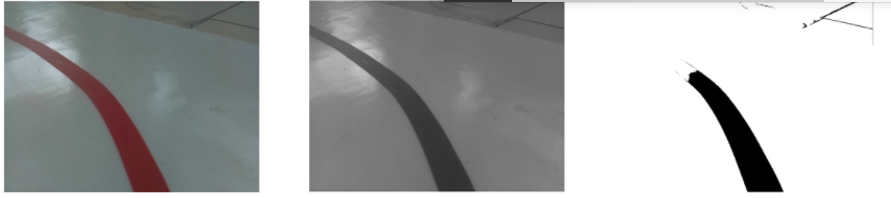
实验采用树莓派作为控制系统的核心部件,操控L298N电机、摄像头、超声波传感器来进行小车的自动化行驶。小车通过摄像头获取寻迹线位置,经过数字图像处理、PID调节得到与小车自身位置的行驶偏差,经过程序判断改变行驶方向,实现自动驾驶。整体代码思路见流程图
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 import RPi.GPIO as GPIO import cv2 as cv import numpy as np GPIO.setwarnings(False) GPIO.setmode(GPIO.BOARD) class MyCar(object): def __init__(self): moter_lf_num = 12 moter_lb_num = 16 moter_rf_num = 18 moter_rb_num = 22 pwm = 500 GPIO.setup(moter_lf_num, GPIO.OUT) GPIO.setup(moter_lb_num, GPIO.OUT) GPIO.setup(moter_rf_num, GPIO.OUT) GPIO.setup(moter_rb_num, GPIO.OUT) self.moter_lf = GPIO.PWM(moter_lf_num, pwm) self.moter_lb = GPIO.PWM(moter_lb_num, pwm) self.moter_rf = GPIO.PWM(moter_rf_num, pwm) self.moter_rb = GPIO.PWM(moter_rb_num, pwm) self.moter_lf.start(0) self.moter_lb.start(0) self.moter_rf.start(0) self.moter_rb.start(0) def forward(self, speed): self.moter_lf.ChangeDutyCycle(speed) self.moter_lb.ChangeDutyCycle(0) self.moter_rf.ChangeDutyCycle(speed) self.moter_rb.ChangeDutyCycle(0) def backward(self, speed): self.moter_lf.ChangeDutyCycle(0) self.moter_lb.ChangeDutyCycle(speed) self.moter_rf.ChangeDutyCycle(0) self.moter_rb.ChangeDutyCycle(speed) def left(self, speed): self.moter_lf.ChangeDutyCycle(0) self.moter_lb.ChangeDutyCycle(0) self.moter_rf.ChangeDutyCycle(speed) self.moter_rb.ChangeDutyCycle(0) def right(self, speed): self.moter_lf.ChangeDutyCycle(speed) self.moter_lb.ChangeDutyCycle(0) self.moter_rf.ChangeDutyCycle(0) self.moter_rb.ChangeDutyCycle(0) def brake(self): self.moter_lf.ChangeDutyCycle(0) self.moter_lb.ChangeDutyCycle(0) self.moter_rf.ChangeDutyCycle(0) self.moter_rb.ChangeDutyCycle(0) def MotorRelease(self): self.moter_lf.stop() self.moter_lb.stop() self.moter_rf.stop() self.moter_rb.stop() def sign(x): if x>0: return 1.0 else : return -1.0 error = [0.0] * 3 adjust = [0.0] * 3 kp = 1.2 ki = 0.1 kd = 0.0 if __name__ == '__main__' : try: car = MyCar() V = 50 cap = cv.VideoCapture(0) last_act = 0 LEFT = 1 RIGHT = 2 while (True): ret, frame = cap.read() b, g, r = cv.split(frame) blur = cv.blur(g, (3, 3)) retval, dst = cv.threshold(blur, 50, 255, cv.THRESH_BINARY) dilate = cv.dilate(dst, (5, 5)) erode = cv.erode(dilate, (5, 5)) detect_arr = [400, 450, 300] i = 0 miss = 0 color = erode[detect_arr[i]] black_cnt = np.sum(color == 0) while black_cnt == 0: i = i + 1 if i != 3: color = erode[detect_arr[i]] black_cnt = np.sum(color == 0) else : i = 0 miss = 1 if miss == 1 and last_act == LEFT: print ("undetect_left!" ) car.left(V * 1.6) break ; if miss == 1 and last_act == RIGHT: print ("undetect_right!" ) car.right(V * 1.6) break ; if miss != 1: black_index = np.where(color == 0) center = np.mean(black_index[0]) direction = center - 320 error[0] = error[1] error[1] = error[2] error[2] = direction adjust[0] = adjust[1] adjust[1] = adjust[2] adjust[2] = adjust[1] + kp * (error[2] - error[1]) + ki * error[2] + kd * (error[2] - 2 * error[1] + error[0]) if center <= 220: print ("left" ) car.left(V + adjust[2] / 200) last_act = LEFT elif center > 420: print ("right" ) car.right(V + abs(adjust[2]) / 200) last_act = RIGHT else : print ("forward" ) car.forward(V) except KeyboardInterrupt: print ("Stopped by User" ) car.brake() car.MotorRelease() GPIO.cleanup()